特徴
目視による選別作業を削減する画像AI認識選別システム
カメラ画像をAI解析し、不良品や異物を素早く検出します。ヒューマンエラーの多い目視手選別の作業を軽減。ロボットアームを使用しないため低コストも実現しています。

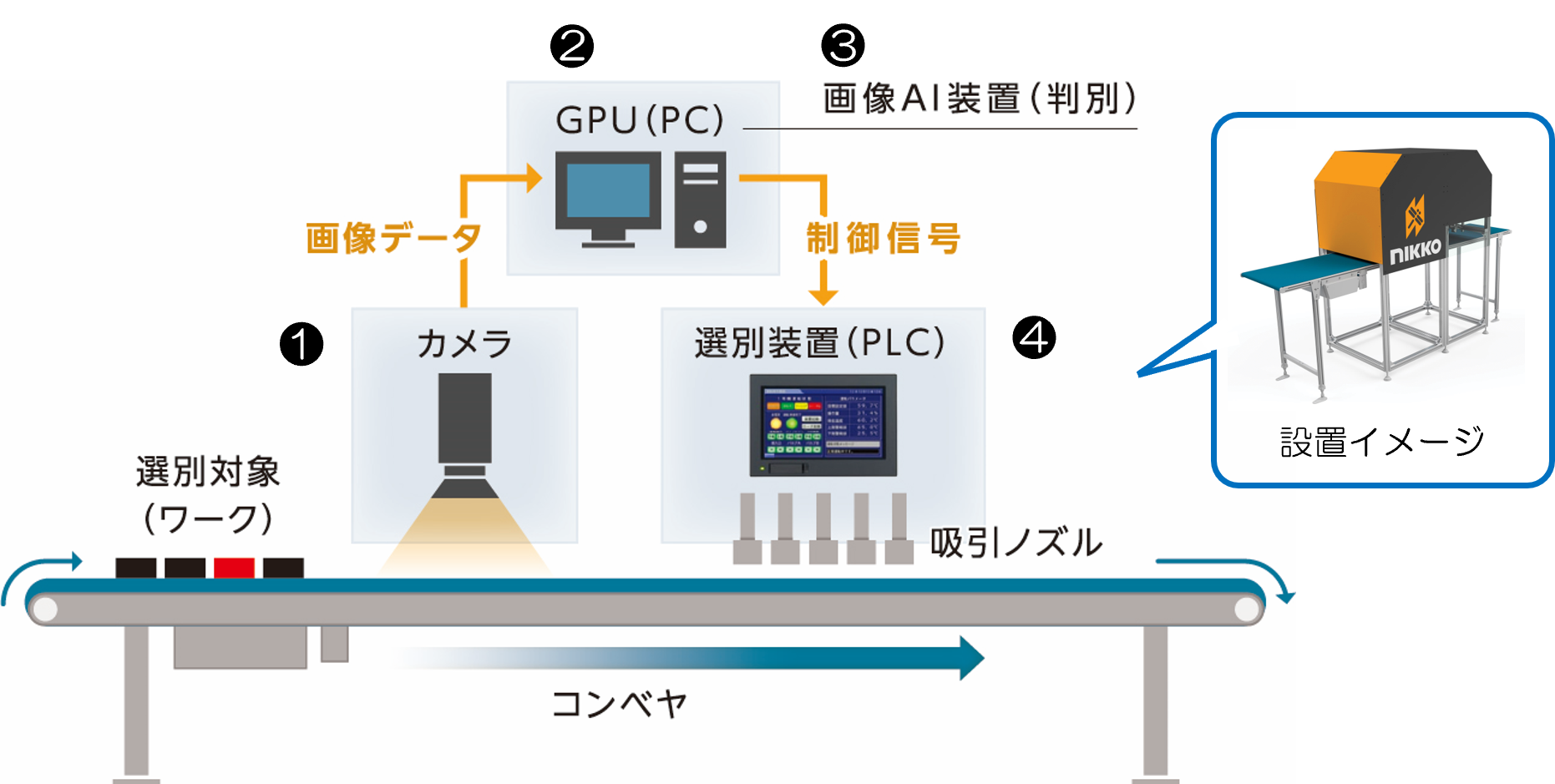
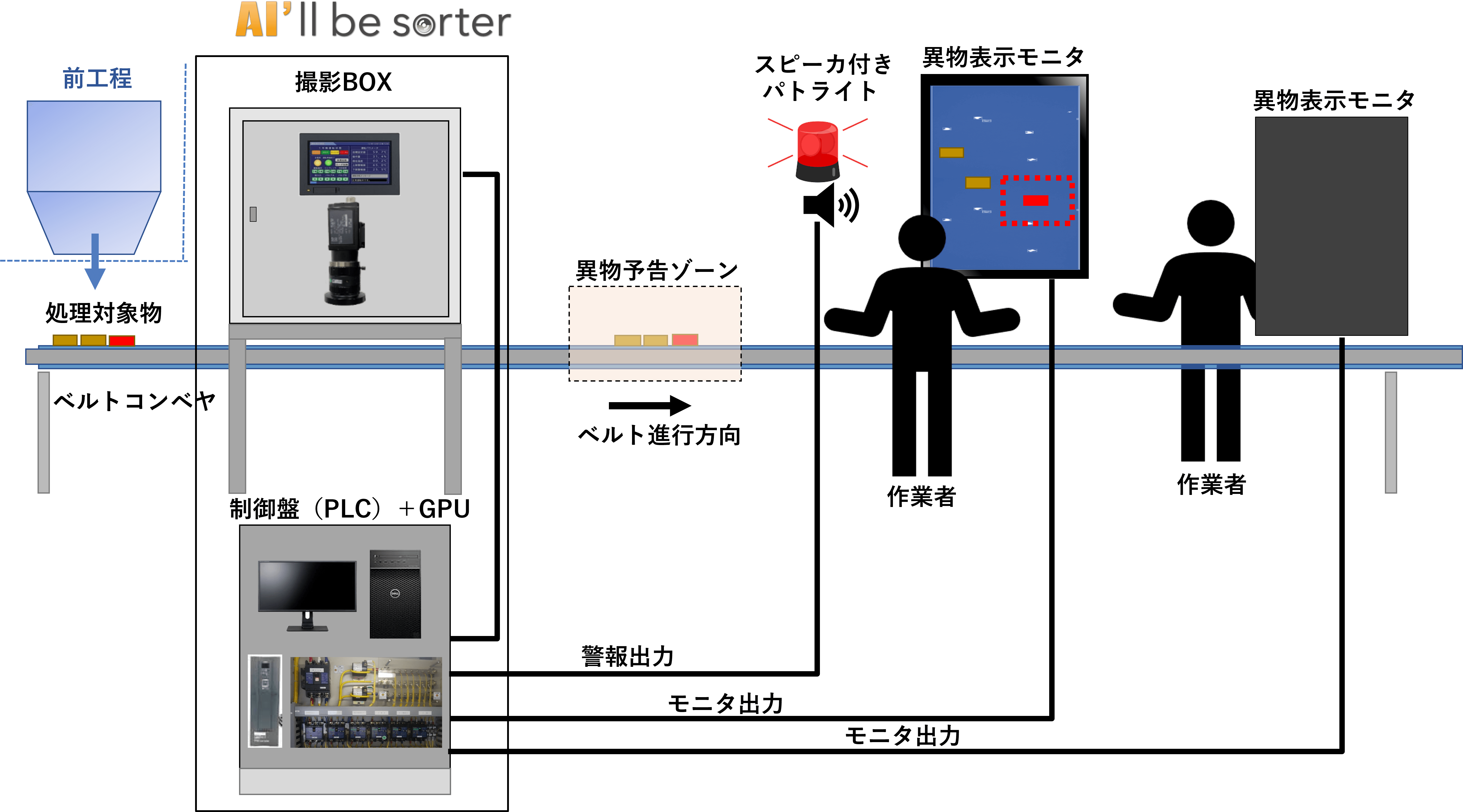
処理フロー
- コンベヤ上に流れるワークをカメラで撮影します。
- 高速GPUにて画像処理します。
- 画像処理データと登録された異物とのマッチングをAIにて判別します。
- 判別された異物の位置情報はピックアップ用データとして選別装置のPLCに送信されます。
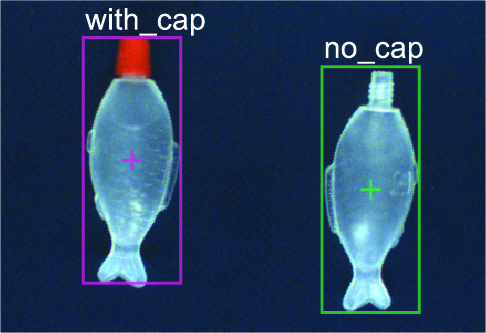
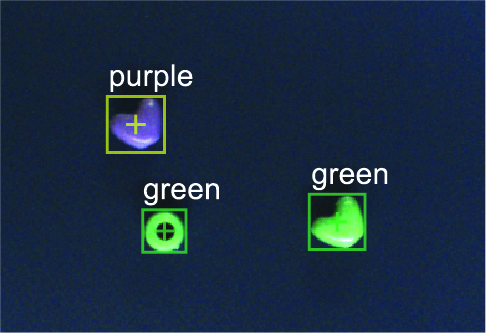
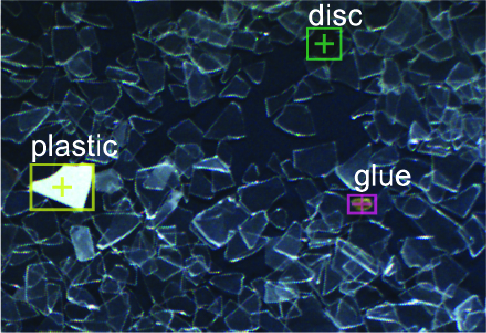
画像判別例
欠損判定
色判定
形状判定:定型
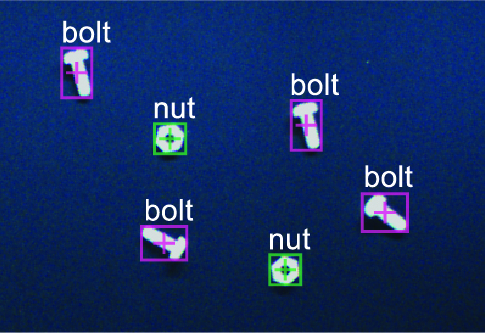
形状判定:不定型
選別方式
ピックアップデータに基づき、異物をコンベヤ上のノズルより吸引します。
圧縮空気による吸引のため、大きな動力源は不要です。
ロボットアームでの選別装置に比べ、シンプルな装置構成のため低コストを実現します。
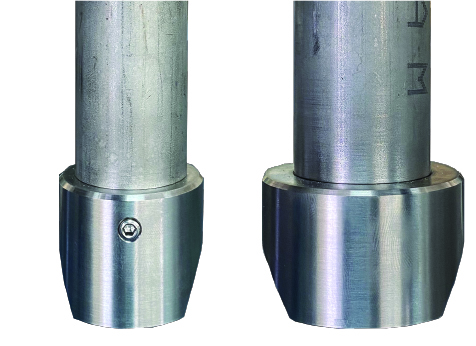
吸引ノズルの口径や形状は、対象ワークに合わせて製作できます。
装置仕様例
| ベルト幅 | 500mm(有効判定幅400mm) |
|---|---|
| コンベヤ速度 | 12m/分 |
| 選別対象サイズ | □4~25mm |
| 選別方式 | エアー吸引方式 |
| コンプレッサ | 2.2kW~(処理量による) |
仕様はワークにより異なります。弊社までご相談ください。
異物検知表示システム
ベルトコンベヤ上の手選別作業者へのナビゲーションとして、TVモニタに異物位置を表示し、作業効率の改善が図れます。
<システム例>
AIの学習モデルはインターネット上の画像データも使用可能です。
<提案事例>
禁忌品(ライタ、Liイオン電池等の発火物)除去の手選別作業用
紹介動画
画像AI判別から選別動作まで。実際の選別のようすもご覧いただけます。